El pasado martes 17 de junio, una parte del equipo de profesores de la familia de Instalación y Mantenimiento del Canónigo Manchón realizamos la segunda visita a nuestros compañeros del I.E.S. Prado Mayor de Totana (Murcia), dentro de las reuniones de coordinación que llevamos a cabo los centros que estamos realizando el proyecto de Innovación “Célula robótica flexible para proceso productivo automatizado en la industria de la alfombra”.
Además de mostrarnos las instalaciones, pudimos comprobar la progresión del proyecto en lo que se refiere a la instalación de equipos y avances en la búsqueda de soluciones al proceso que nuestros colegas están realizando. También realizamos una reunión de coordinación y preparación del próximo informe de seguimiento que presentaremos el próximo 10 de julio.
El próximo curso 25/26, un equipo de 5 alumnos de Mecatrónica realizarán nuestra parte del proyecto en nuestras instalaciones. Seguiremos informando e invitando a todo aquel interesado que desee conocer en profundidad este proyecto.
Dimarts passat 17 de juny, una part de l’equip docent de la família d’Instal·lació i Manteniment del Canonge Manchón vam visitar als nostres companys de l’I.E.S. Prado Major de Totana (Múrcia), dins de les reunions de coordinació que duem a terme els centres que estem realitzant el projecte d’Innovació “Cèl·lula robòtica flexible per a procés productiu automatitzat en la indústria de la catifa”.
A més de mostrar-nos les instal·lacions, vam poder comprovar la progressió del projecte pel que fa a la instal·lació d’equips i avanços en la recerca de solucions al procés que els nostres col·legues estan realitzant. També vam celebrar una reunió de coordinació i preparació del pròxim informe de seguiment que presentarem el pròxim 10 de juliol.
El pròxim curs 25/26, un equip de cinc estudiants de Mecatrònica realitzarà la nostra part del projecte en les nostres instal·lacions. Continuarem informant i convidant a tots els interessat que desitgen conéixer en profunditat este projecte.
La familia professional de Instalación y mantenimiento ha iniciado el curso 2022/2023 una nueva etapa marcada por importantes cambios, como la nueva metodología de aprendizaje por proyectos, propuesta del equipo de profesores de un departamento que cuenta con especialidades como mecanizado y mantenimiento de máquinas; electricidad y electrónica; organización de proyectos… y que ha sido aprobada para este curso por la Dirección General de Formación Profesional. El nuevo enfoque metodológico motiva a los alumnos y acerca a las habilidades de estós para trabajar en el entorno industrial.
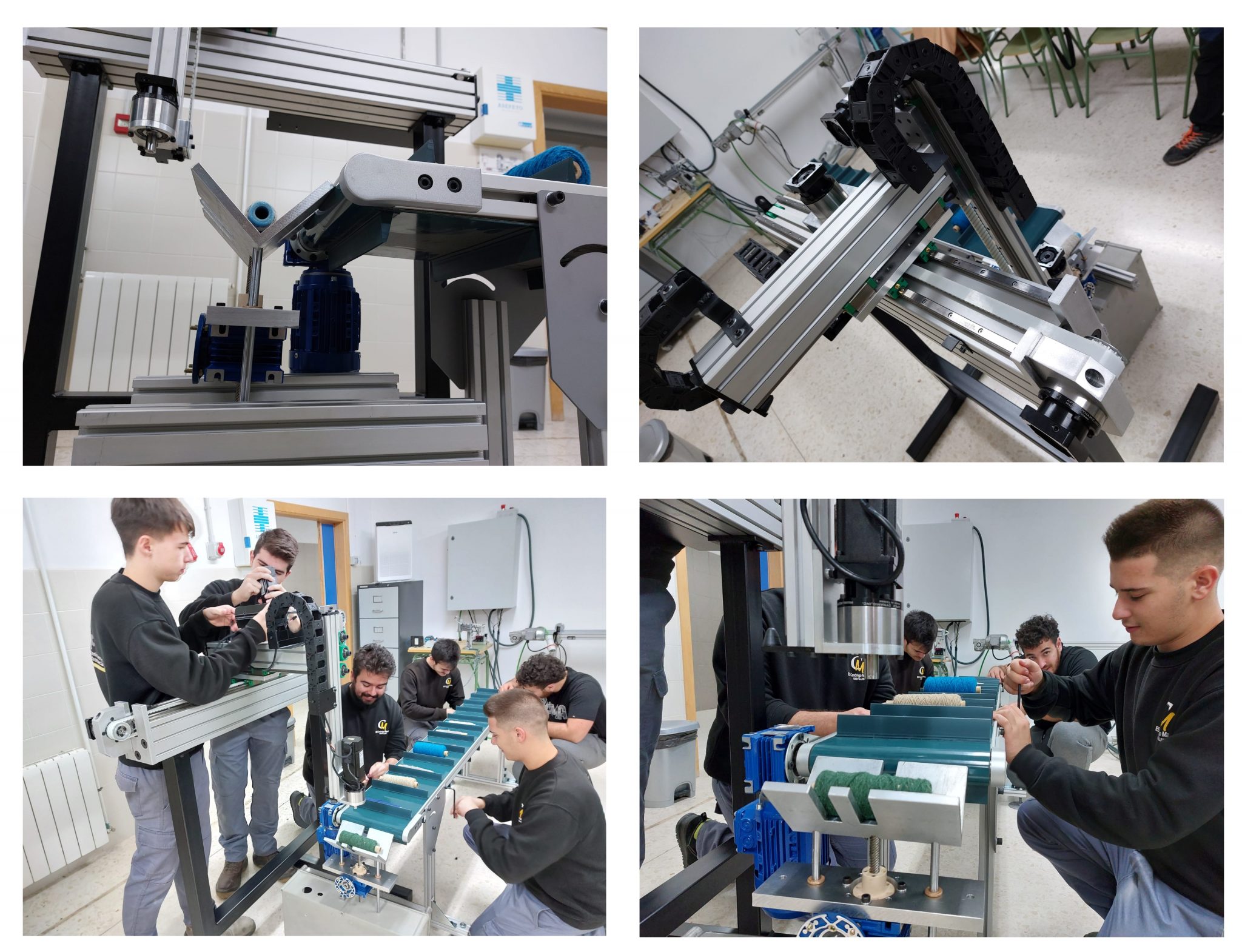
A través del Proyecto seleccionado por Dualiza Caixabank en la convocatoria 2022 el equipo de profesores ha conseguido financiación para el diseño de un robot cartesiano, que pretende resolver una necesidad industrial en el sector de alfombras y moquetas, gracias a la ayuda de Alfombras Imperial y con el apoyo de Unifam, . El robot cuenta con tres ejes principales de control que son lineales en una configuración de ángulos rectos que simplifica las ecuaciones en el control del brazo robótico. Se trata de un equipamiento que impulsará la implantación de la nueva metodología de aprendizaje.
A través de este Proyecto también se inicia una fase de apertura de relaciones con las empresas de entorno industrial, con una colaboración que redundará en mejoras de los procesos de aprendizaje y desarrollo de competencias de los alumnus, dentro del objetivo de una mayor adaptación en conocimiento y habilidades al entorno industrial.
El autómata que controla el robot cuenta con un sistema de movimiento basado en servomotores y servodrives aplicados a unas reductoras planetarias que, a través de un sistema de correas dentadas, consiguen gestionar el desplazamiento, velocidad y par motor en las las coordenadas XYZ de posicionamiento del robot. Todo el robot se sustenta en un chasis robusto diseñado para esta aplicación, todo ello para el manejo de una mano robot soportada sobre patines y garra que manipula los carrillos en el proceso de separación de la lana y el canuto, que puede ser de diferentes materiales (cartón, plastico, madera…). El proceso finaliza con un cilindro que, por impacto, separará la lana del conjunto del carrillo.
El robot es uno de los proyectos destacados en esta nueva metodología iniciada en este curso en el IES Canónigo Manchón, permitiendo a los alumnos la entrada de una tecnología avanzada en motion control, control de movimiento para servomotores, servodrivers y programación informática en el control de las variables para la precisión y el sincronismo del robot.
03003966
Avís de privacitat
Este lloc web utilitza només cookies tècniques necessàries per al seu funcionament. No s’emmagatzemen dades amb finalitats publicitàries ni es comparteixen amb tercers. S’utilitza analítica interna sense cookies, i només es recull la IP amb finalitats de seguretat.